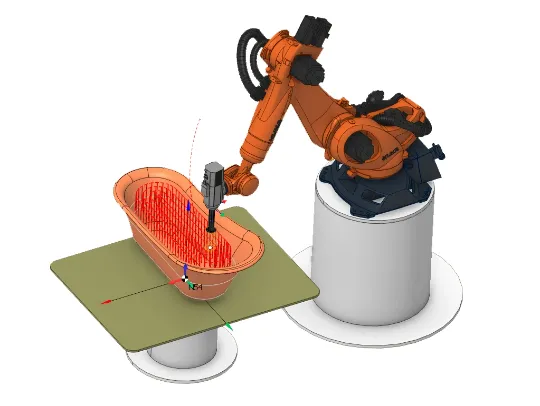
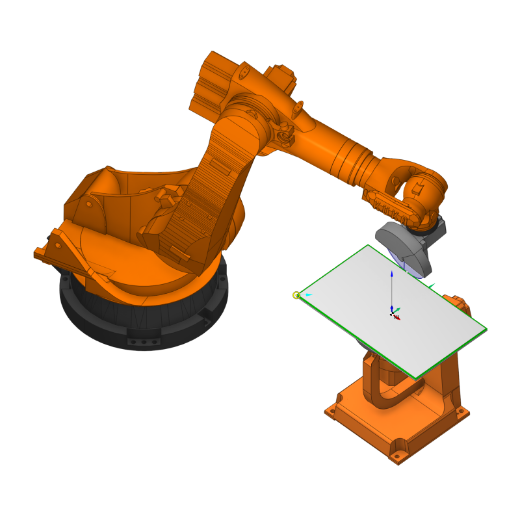
ФРЕЗЕРОВАНИЕ
3 — 5D фрезерование с поддержкой внешних осей
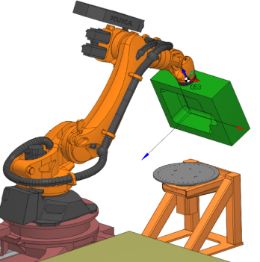
РЕЗКА
5-осевая резка с точным управлением вектором инструмента в каждой точке
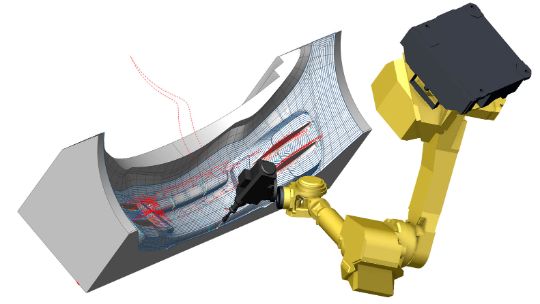
НАПЛАВКА
3—5D наплавка с контролем толщины слоя
СВАРКА
Простое решение для программирования сварки

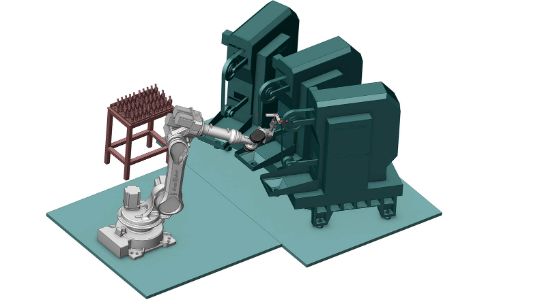
ПОЛИРОВКА
Поддерживается работа, когда деталь закреплена на неподвижной оснастке и движется инструмент, так и когда деталь закреплена на роботе, а инструмент неподвижен

ОБРАБОТКА СКУЛЬПТУР
Черновая обработка камня, дисковый инструмент, сложная 5D чистовая обработка сетчатых моделей (mesh)
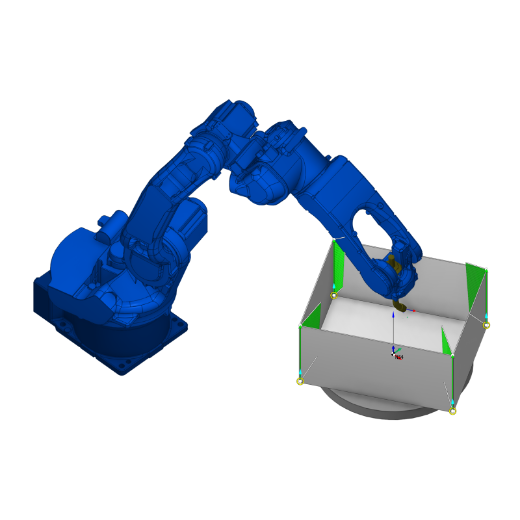
Pick-and-place
Pick-and-place с автоматическим обходом столкновений
Дисковый инструмент
Черновая обработка камня, дисковый инструмент, сложная 5D чистовая обработка сетчатых моделей (mesh)
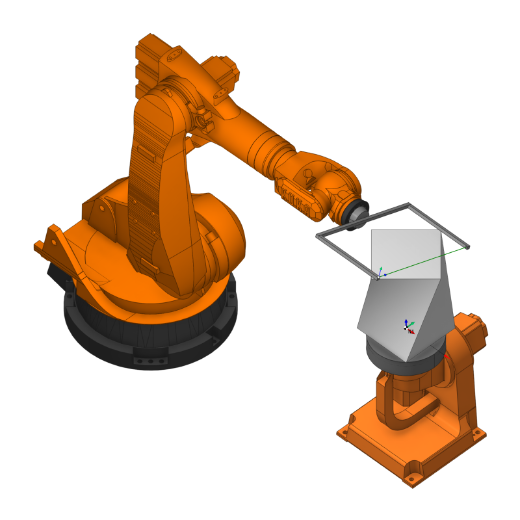
Резка горячей проволокой
Сверхбыстрый съем материала для обработки пеноматериала
CRM-форма появится здесь
© 2024 АО "ЛО ЦНИТИ"